现如今,激光焊接机器人的应用已然是越来越广泛,之所以如此,就是因为其中使用了激光焊缝跟踪系统。激光焊缝跟踪系统是可以在焊接时对焊缝轨迹进行严密跟踪控制的,所以能够确保焊接更加精准。那么口碑好的激光焊缝跟踪系统是如何跟踪焊缝的呢?
激光焊缝跟踪系统是如何跟踪焊缝的?
1、对焊缝轮廓预测量
激光焊缝跟踪系统会通过视觉系统预先对工件进行测量,其目的就是为了更好地利用焊缝轮廓信息。在做这一步时,激光焊缝跟踪系统会控制机器人以较低的速度沿着焊缝的延伸方向运动,再通过机械手末端的相机来捕获和识别图像的特征点以及坐标,然后将空间坐标信息传送到控制器进行预测量。
2、拐点识别与拐角辨认
焊缝轮廓由拐角与直线段组成,为了获得更好的跟踪性能,激光焊缝跟踪系统会在不同的轮廓段使用不同的控制策略,并且,为了辨认拐角区域的位置,还会快速有效地对拐点进行识别,以保证可以对焊缝进行有效跟踪。
3、实时焊缝跟踪
激光焊缝跟踪系统会根据视觉系统的检测和判断进行跟踪运动。每一次的检测循环都会识别一个特征点,检测过后系统会进行判断,并根据不同的轮廓部分采用不同的控制策略。为了使激光焊缝跟踪系统更加稳定,在两个相邻的检测点之间插补合适个数的插补点以确保相邻的运动点之间的距离足够小。
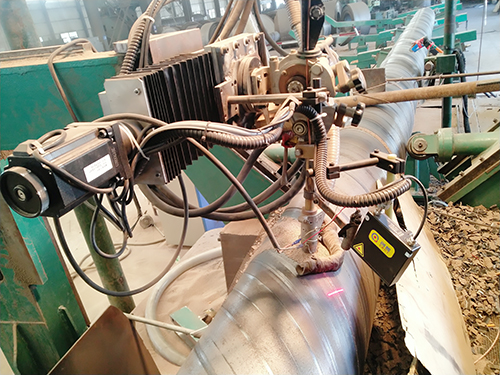
实现焊接机器人焊缝跟踪定位的常用方法是外围辅助检测,外围辅助检测主要实现激光跟踪、摄影成像跟踪。这种焊缝跟踪寻位控制系统可以通过光学测量设备采集焊缝相关数据,焊接机器人可以通过数据对比调整自适应臂的运动轨迹,从而实现对焊缝的实时跟踪。
使用激光焊接不仅有效降低材料消耗,也能大幅提高焊接的效率,所以在现代化的生产过程中激光焊接应用的越来越普遍,为了让激光焊接的质量更好,厂家往往会配合专业的激光焊缝跟踪系统来使用,通过各种手段让激光焊缝跟踪系统对焊缝进行有效的跟踪控制。